Affordable open-source mobile network enables real-time robotic control
23 Oct, 2025

Dr Saber Hassouna and Professor Qammer Abbasi
A breakthrough in affordable, open-source mobile networks could help bring remote medical care closer to reality.
Researchers at the University of Glasgow’s James Watt School of Engineering have developed a low-cost 4G LTE mobile network that enables near-real-time control of a robotic arm using off-the-shelf hardware. The system allows precise, low-latency movement an essential requirement for delicate procedures such as remote surgery.
In their latest study, published in Communications Engineering, the team demonstrated how the system can perform mock dental examinations, showcasing its potential for future medical applications.
Built using the Open Radio Access Network (O-RAN) framework, the system relies on open-source software and a repurposed USB dongle to create a stable, energy-efficient connection between a haptic controller, robotic arm, and intelligent base station. Using O-RAN’s programmable xApps, researchers achieved smooth control with minimal signal loss and less than one second of latency while consuming 90% less power than comparable setups.
“The Internet of Skills is now one step closer with low-latency, high-reliability links made possible through O-RAN,” said Professor Muhammad Imran, Head of the James Watt School of Engineering. “Our work lays the foundation for inclusive, affordable digital access worldwide.”
The project, led by Dr Saber Hassouna and Professor Qammer Abbasi, demonstrates how O-RAN can support complex robotic teleoperation, with plans to expand the system’s performance over longer distances.

Haptic Controller
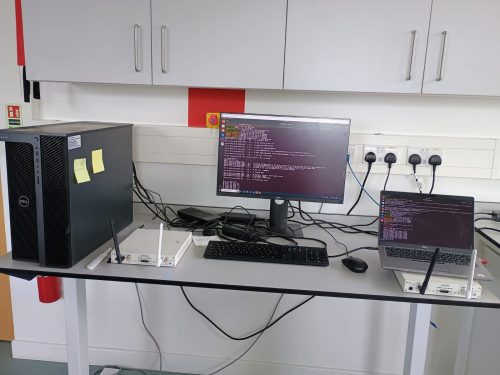
Experimental Setup
This research was supported by the Communications Hub for Empowering Distributed clouD computing Applications and Research (CHEDDAR) and the Engineering and Physical Sciences Research Council (EPSRC).
Read the full paper in https://www.linkedin.com/pulse/mobile-network-breakthrough-could-enable-t0w0e/

